
























作品詳情
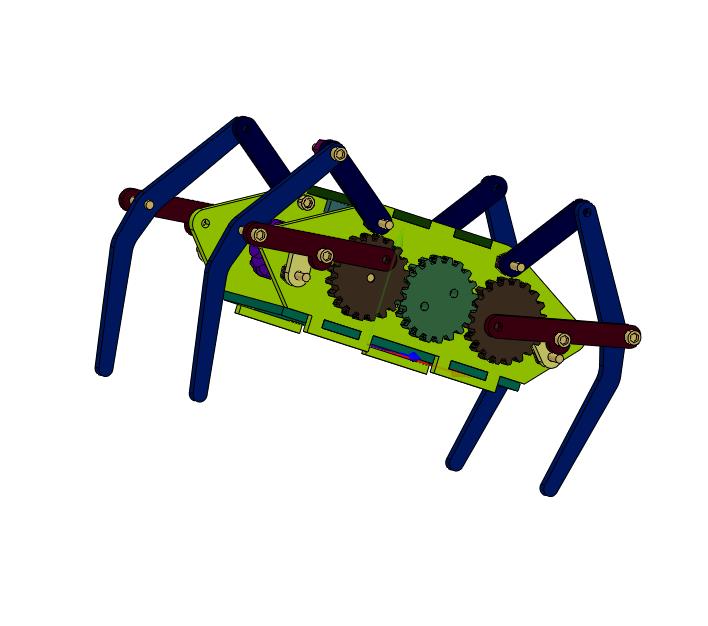
單電機四足仿生機器人套件是一種集成了先進技術(shù)與仿真設(shè)計的機器人產(chǎn)品。該套件采用單一電機驅(qū)動,具備四個仿足行走機構(gòu),可實現(xiàn)穩(wěn)定行走與靈活運動。其設(shè)計結(jié)合了生物學(xué)原理與工程技術(shù),提高了機器人的運動性能和適應(yīng)性。此外,該套件包含多種功能模塊和配件,方便用戶進行組裝、調(diào)試與擴展,適用于科研、教育及工程應(yīng)用等領(lǐng)域。



平diy桌面級快速成型3D打印機")





動臺袋子印畫設(shè)備")









